
视觉or激光雷达——谁将主导自动驾驶
来源:郭天戈 浏览人数:28614 时间:2020/12/25
2019年4月,在美国加州举办的特斯拉投资者日活动上,特斯拉推出全自动驾驶Autopilot 硬件 3.0,这套系统包含8个视觉摄像头,12个超声波传感器,以及自研的全自动驾驶芯片。
汽车自动驾驶的流程包括3个步骤:感知、判断、操控。在感知层面,目前主要有两种技术路线主导自动驾驶,一是基于摄像头的视觉感知,二是基于激光雷达的物理感知。马斯克从第一性原理出发,让汽车模仿人类,人类在驾驶汽车时通过眼睛获取信息,经过大脑处理后进行判断、操控,因此人类驾驶完全是视觉驱动。特斯拉坚持以视觉为主导的自动驾驶方案,使用高性能的车载芯片处理来自视觉传感器收集到的交通信息,通过深度学习,将信号与已知的物体进行匹配,再作出决策。
特斯拉在汽车周围配置足够多的摄像头,创造出比人类眼睛视界更宽广、更清晰的“摄像头眼睛”,再配置比人类大脑反应速度更快、计算能力更强的处理器芯片,以确保驾驶的安全性。然而,这一套缜密的系统并没有足够安全,摄像头有天然的缺陷,当遇到较强的反光或以白色为基调的物体时,系统可能会判断成云朵甚至认为没有障碍物。在自动驾驶模式下,特斯拉曾出过多起事故,例如把白色的卡车判断为云朵,加速穿过导致事故。
实际上,生物判断方向并不全是通过眼睛,例如蝙蝠就是通过发射声波、感知声波反射的时间来判断障碍物,激光雷达就是应用这种原理实现汽车自动驾驶。激光雷达发射激光,遇到障碍物后原路返回,处理器利用时间计算距离。激光光束可以准确测量物体轮廓边缘与发射器间的距离,这些轮廓信息组成“点云”,然后处理器可以绘制出3D高精度环境地图,从而准确判断汽车周围的物理环境。另外,激光雷达有很迅速的响应时间,可以使汽车的处理器快速应对路况的变化。iPhone的前置结构光3D摄像头也是用了这种原理。无论是视觉路线还是激光雷达,目的都是为了让汽车“看清”周围的环境,激光雷达可以直接提供物体的精确距离和位置,而摄像头视觉方案需要计算机根据图像来判断,这就存在错判的可能。目前参与自动驾驶研发的企业大多以激光雷达作为主导,如谷歌Waymo、百度、UBER等。
为何特斯拉坚持不用激光雷达?成本是阻碍其商业化的核心因素。Velodyne目前是全球规模最大的激光雷达供应商,其最低配置的雷达型号起步价3999美元,主流型号价格在数万美元,这与马斯克“制造消费者可负担的电动车”的目标不符,而且特斯拉汽车明年的全球销量可能超过100万辆,目前没有供应商有匹配的产能。
然而,情况正在迅速改变。随着众多研发型企业的加入,激光雷达技术快速更新迭代,成本也在快速下降。专注于固态激光雷达技术的硅谷新锐Luminar公司,计划2022年开始将激光雷达交付于量产车,实现商业化,价格可能降低至500-1000美元。按照目前全球主要汽车制造商的预估,1000美元以内是L4级别自动驾驶所需激光雷达的商业化价格目标。近日,华为首次发布了车规级激光雷达产品和解决方案,也已经建立第一条车规级激光雷达的产线,按照年产10万套/线在推进。华为表示:“激光雷达是解决连续自动驾驶体验的关键传感器,其带来的智能驾驶体验将远超任何一个已商用的智能驾驶系统。”发布会当日,北汽新能源宣布2021年将推出全球首款搭载华为激光雷达的车型。此前小鹏汽车也表示,将在2021年生产的车型中采用激光雷达技术提高性能。
自动驾驶按照自动化程度分为五个等级:从L1级别的辅助驾驶到L5级别的完全自动驾驶,目前商业化的量产车型基本上在L2/L3以内,这一层级的自动驾驶以摄像头视觉为主导,但从长期趋势上看,L5级别的完全自动驾驶才是最终的发展方向,而L3级以上基于视觉并不完全可靠。
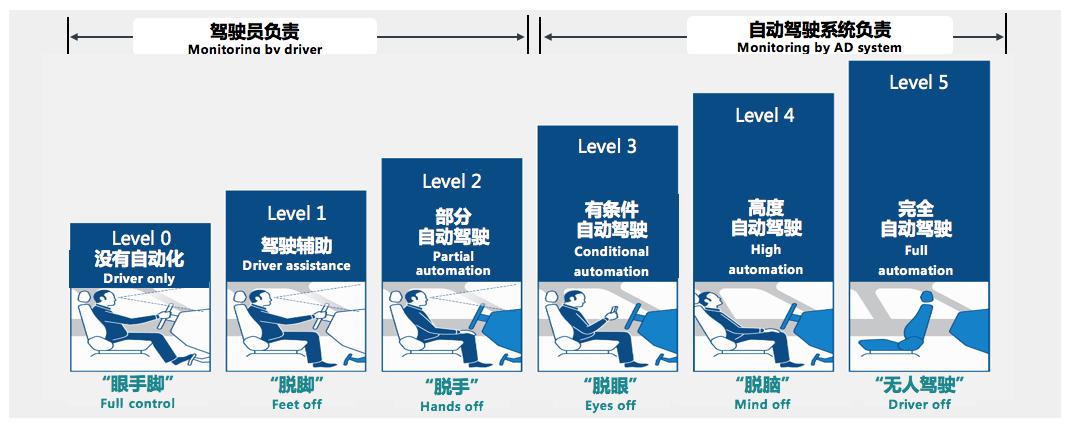
图. 自动驾驶等级分类
产业界目前对最佳的自动驾驶方案没有定论,但从乘客安全、技术升级、规模化量产降本的角度上看,预计摄像头视觉和激光雷达将共同主导自动驾驶,两者在技术上都有各自的优势和劣势,互相配合、增加硬件冗余才能带来绝对的安全。从消费者角度看,增加少量购车成本以换取更高的安全度合乎逻辑,毕竟生命至高无上。
免责声明
本资料仅供本公司的合格投资者参考阅读,不因接收人收到本资料而视其为本公司的当然客户。本资料基于本公司认为可靠的且目前已公开的信息撰写,在任何情况下,本资料中的信息或所表述的意见不构成广告、要约、要约邀请,也不构成对任何人的投资建议。本资料版权均归本公司所有。未经本公司事先书面授权,任何机构或个人不得以任何形式引用或转载本资料的全部或部分内容。
粤ICP备15108701号 版权所有:深圳展博投资管理有限公司
 粤公网安备 44030402005514号
粤公网安备 44030402005514号